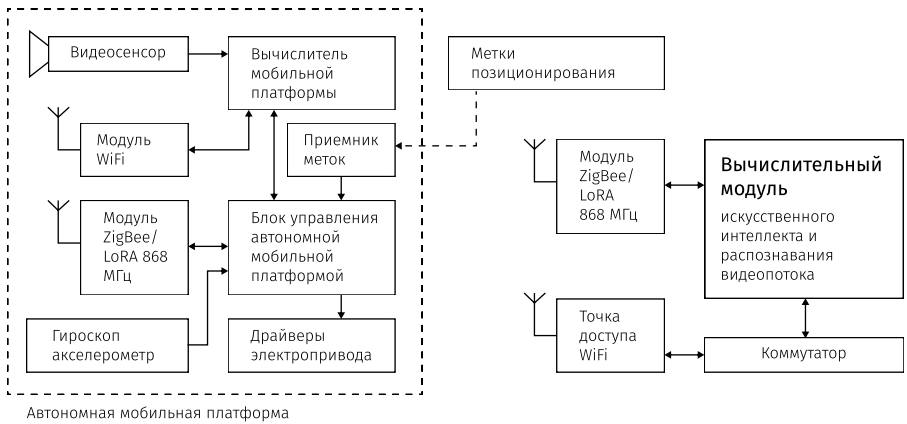
Вычислительный модуль на основе искусственного интеллекта транслирует данные для мобильной платформы. Мобильная платформа осуществляет селекцию и выбор изделий, их захват и позиционирование, и, основываясь на данных меток и видеосенсора, следует по заданному пути к центру обработки изделий.